机器人作为机械、控制等基础学科交叉融合的产物,是领域研究热点。柔性仿生机器鱼不仅集成了机械工程的精密设计与制造技术,还融合了流体力学、电子控制以及生物模拟等多学科知识,形成了一种新型的智能系统。通过模仿真实鱼类的柔性运动,机器鱼能够在复杂多变的水下环境中执行监测、探索甚至救援等任务,展现出了强大的潜力和应用前景。
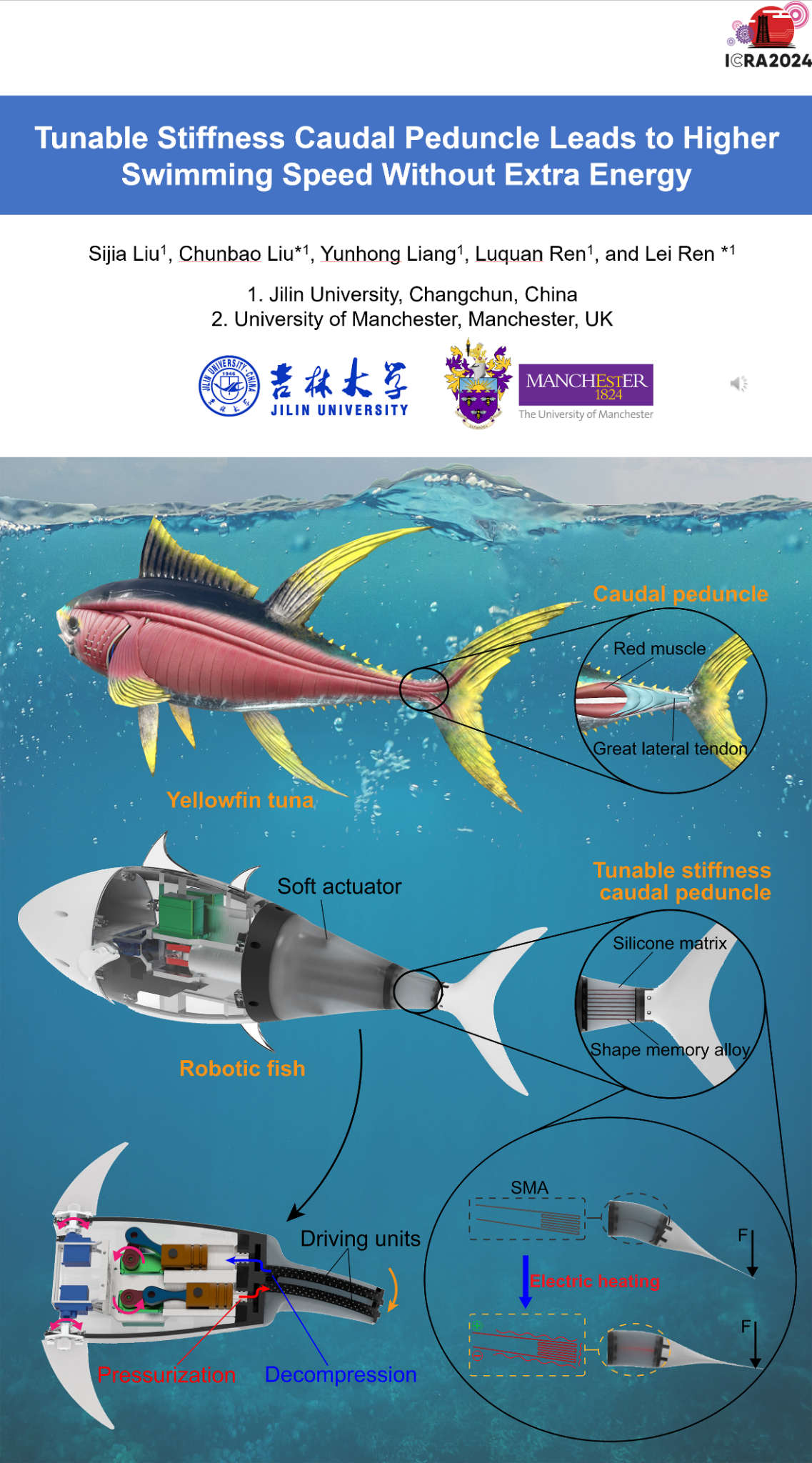
近日,公司刘春宝教授研究团队开发了一款新型无系留液压驱动的仿生机器鱼,发表了系列高水平论文。以“Design and Control of an Untethered Robotic Tuna Based on a Hydraulic Soft Actuator”为题被机电一体化技术国际顶级期刊IEEE/ASME Transactions on Mechatronics接收。以“Tunable Stiffness Caudal Peduncle Leads to Higher Swimming Speed Without Extra Energy”为题,发表于机器人和自动化领域顶级期刊IEEE Robotics and Automation Letters(https://doi.org/10.1109/LRA.2023.3300587),并被2024年国际机器人顶会(ICRA 2024)录用。太阳成集团tyc122cc博士生刘思佳为上述论文的第一作者,刘春宝教授和任雷教授为论文的共同通讯作者,任露泉院士给予了理论指导。
该机器人的设计灵感来源于黄鳍金枪鱼,通过模拟鱼类肌肉的工作机制,实现了机器鱼的高效自主游动。机器鱼的核心在于其肌肉启发的液压柔性驱动器,该驱动器采用了双缸柱塞泵作为动力源,通过伺服电机驱动,为机器鱼提供了强大的推进力。与传统的双向齿轮泵相比,双缸柱塞泵的设计大幅提高了机器鱼的驱动频率,并能够支持更多样化的驱动模式。

在性能方面,液压柔性机器鱼最大游泳速度可达0.84 BL/s,在同类软体机器鱼中表现突出。此外,机器鱼的运输成本(COT)低至11 J/(kg*m),展现出了优异的能效比。机器鱼还具备了三维游动的能力,能够通过控制驱动器的不对称偏转和胸鳍的俯仰角,实现直线游动、转弯以及上浮下潜等复杂动作。这一成果不仅为水下机器人的设计提供了新的设计思路,也为生物启发式研究在水下机械设计和运动控制领域的应用提供了宝贵的参考。研究受到了国家自然科学基金和太阳成集团tyc122cc中央高校基本科研业务费专项资金的资助。